UM0003 JxServo Studio CANFD 桥接使用教程
| 项目 | 信息 |
|---|---|
| 文档编号 | UM0003 |
| 文档版本 | Rev. 1.0 |
| 适用产品 | JxServo Studio、Jx CANFD Bridge |
| 工具版本 | Jx CANFD Bridge v2.0.0 |
| 语言 | 简体中文 |
| 最后更新 | 2026-06-12 |
适用范围
本文档用于说明如何使用 Jx CANFD Bridge 工具,将 CAN FD 适配器连接到 JxServo Studio。Jx CANFD Bridge 是巨蟹智能针对人形机器人整机调试场景开发的专用桥接工具。当人形机器人已经完成装机、走线或外壳封装,不方便直接接入关节模组 USB 调试口时,可通过 CAN FD 适配器将目标模组桥接到 JxServo Studio。
桥接工具负责接入 CAN FD 总线,并在本机提供 UDP 通信端口;JxServo Studio 通过 UDP 连接桥接工具后,可以继续使用数据连接、命令列表、常用数据和数据波形等功能。
CAN FD 总线限定
Jx CANFD Bridge 只支持 CAN FD 总线,禁止接入非 CAN FD 总线或普通 CAN 总线。错误接入会破坏总线数据,导致通信异常,并可能影响同一总线上的控制业务。
波形使用建议
JxServo Studio 的高速数据波形能力主要面向高速 USB 链路设计。通过 CAN FD 桥接时,大量波形数据会占用 CAN 总线带宽,并可能影响同一总线上的实时控制通信。非必要情况下,建议仅使用桥接通道进行参数查看和参数修改;只有在排查故障,且确认波形数据不会影响总线控制性能时,才开启数据波形或高频遥测。
如果需要使用 USB 直连方式连接设备,请参考 UM0001 JxServo Studio 连接与波形查看教程。
操作安全
CAN FD 桥接建立后,上位机命令会通过 CAN FD 下发到设备。执行使能、控制、校准或运动类指令前,应确认设备固定可靠、运动空间安全,并具备断电或急停手段。
1. 准备工作
开始前请确认以下条件已经满足:
- 已安装并可正常打开 JxServo Studio。
- 已将 CAN FD 适配器连接到电脑,并完成对应厂商驱动安装。
- CAN FD 适配器已经接入目标设备所在 CAN FD 总线。
- 目标设备已经正常供电。
- 已知目标设备的模组 ID。未单独修改时,通常使用默认值
1。 - 已知当前 CAN FD 总线速率。未单独修改时,通常使用默认值
1M + 5M。 - 已确认 JxServo Studio 的 UDP 参数。默认使用本机 IP
127.0.0.1、本地端口9001、对侧端口9000。
2. 在 JxServo Studio 中打开 UDP 监听
使用 CANFD 桥接时,应先让 JxServo Studio 打开 UDP 监听,再启动 CANFD 桥接工具。Windows 下如果桥接工具先向未监听的上位机端口发送 UDP 数据,可能触发 [WinError 10054] 远程主机强迫关闭了一个现有的连接,导致桥接工具退出。
2.1 进入数据连接页面
打开 JxServo Studio,进入“数据连接”页面。如果已经导入推荐布局,也可以直接点击顶部或左侧的“数据连接”标签。
2.2 填写 UDP 参数并打开通信连接
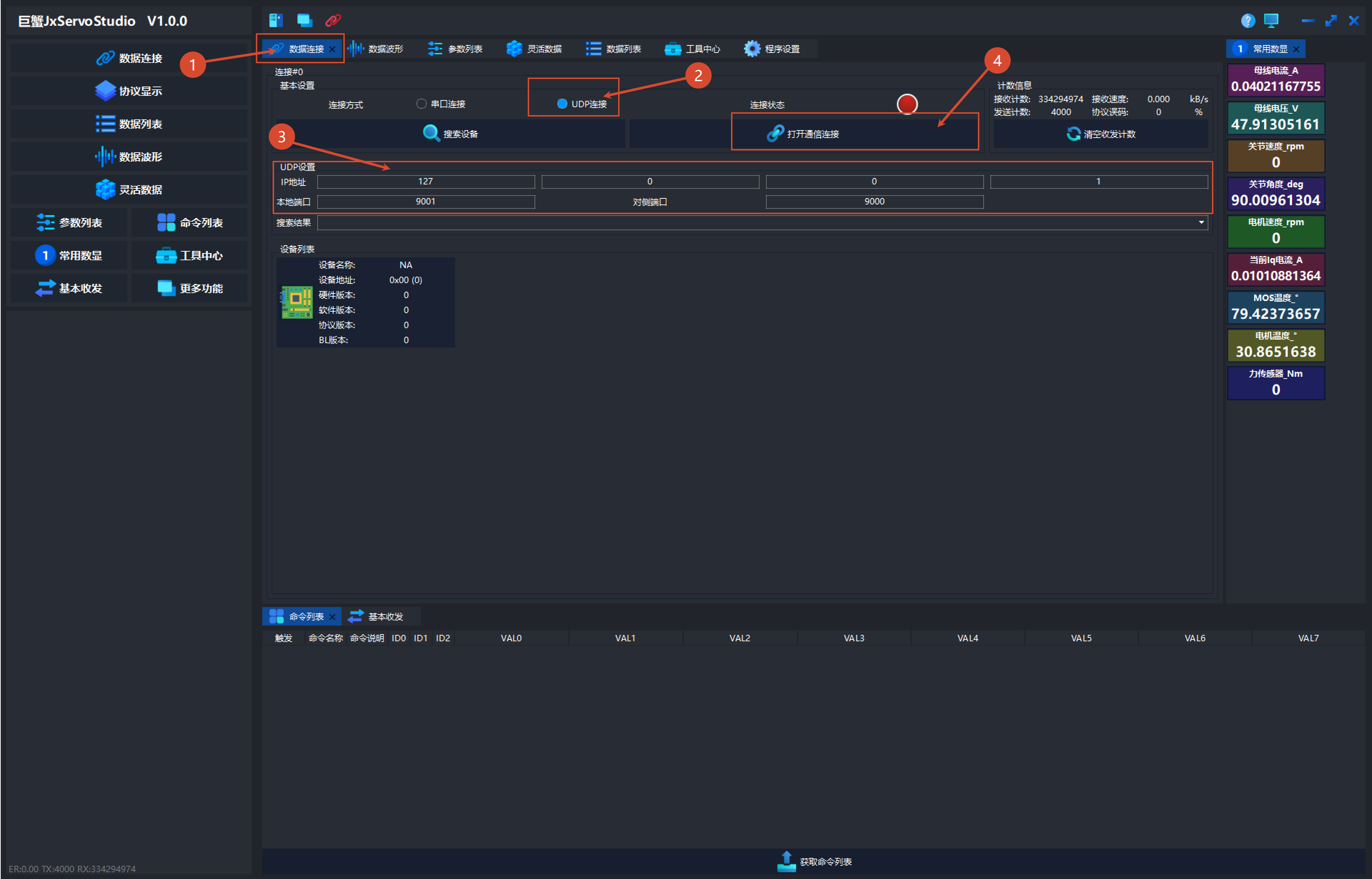
在“连接方式”中选择“UDP连接”,填写 UDP 设置,然后点击“打开通信连接”。此时即使 CANFD 桥接工具尚未启动,也应先让 JxServo Studio 进入 UDP 监听状态。
| 编号 | 操作 | 说明 |
|---|---|---|
| 1 | 打开“数据连接”页面 | 用于配置上位机通信方式。 |
| 2 | 选择“UDP连接” | 使用桥接工具提供的 UDP 通道连接设备。 |
| 3 | 填写 UDP 设置 | 桥接工具与上位机在同一台电脑时,IP 地址填写 127.0.0.1,本地端口填写 9001,对侧端口填写 9000。 |
| 4 | 点击“打开通信连接” | 先打开 JxServo Studio 的 UDP 监听,等待桥接工具启动后建立完整通信。 |
同一台电脑运行时,推荐填写:
| 参数 | 填写值 |
|---|---|
| IP 地址 | 127.0.0.1 |
| 本地端口 | 9001 |
| 对侧端口 | 9000 |
启动顺序
推荐顺序为:先在 JxServo Studio 中选择 UDP 连接并点击“打开通信连接”,再启动 CANFD 桥接工具。若已经先启动桥接工具并出现 WinError 10054,请重新打开 JxServo Studio 的 UDP 连接后,再重新启动桥接工具。
3. 启动 CANFD 桥接工具
3.1 解压工具包
将 Jx_CANFD_Bridge_v2.0.0_20260615.zip 解压到本地目录。解压后可看到 configs、wheels、ZLG_lib、README 文件以及 启动CANFD桥接.bat 等内容。
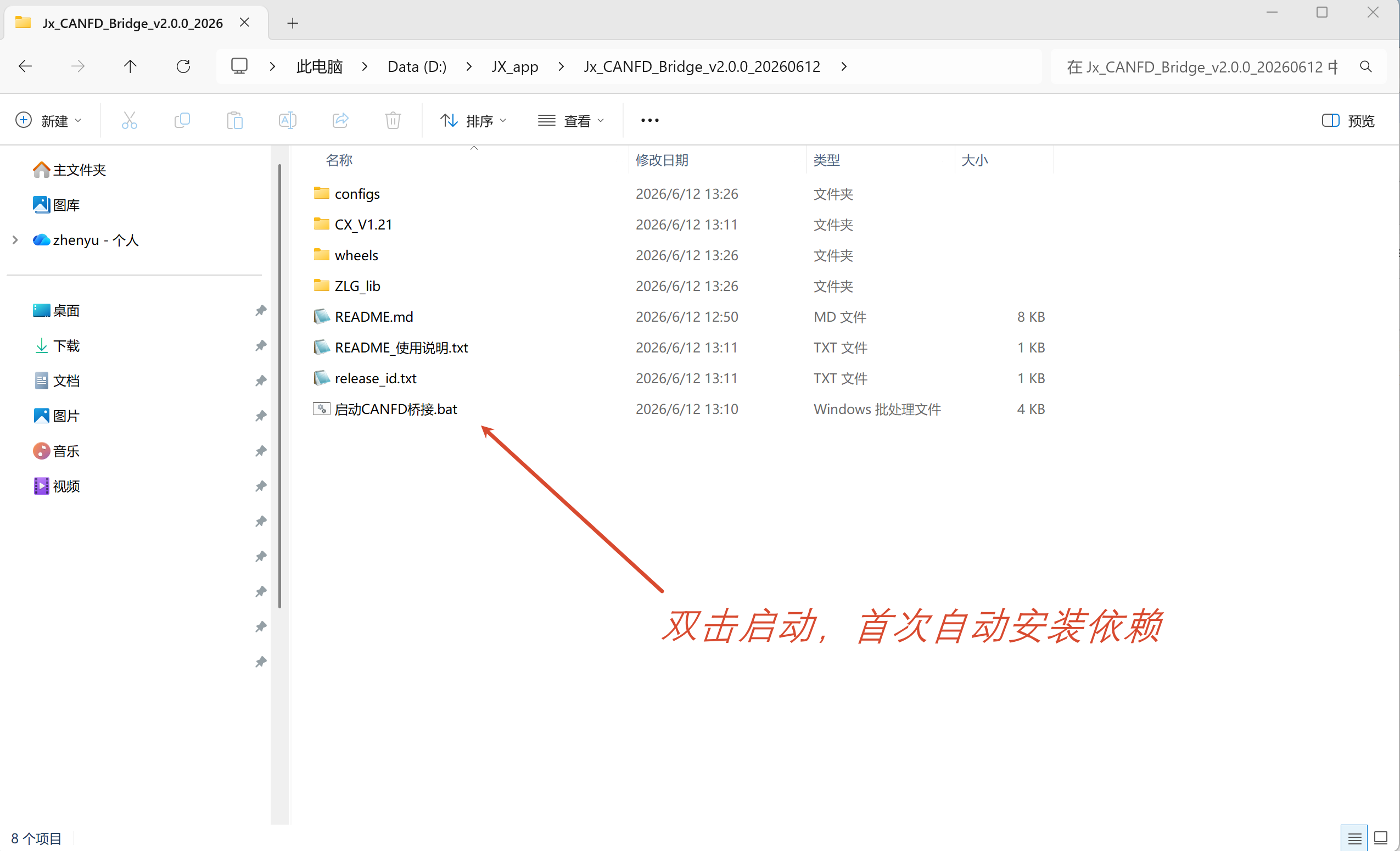
双击 启动CANFD桥接.bat 启动桥接工具。首次启动时,工具会自动安装运行依赖,请等待命令行窗口进入配置向导。
3.2 选择 CANFD 设备
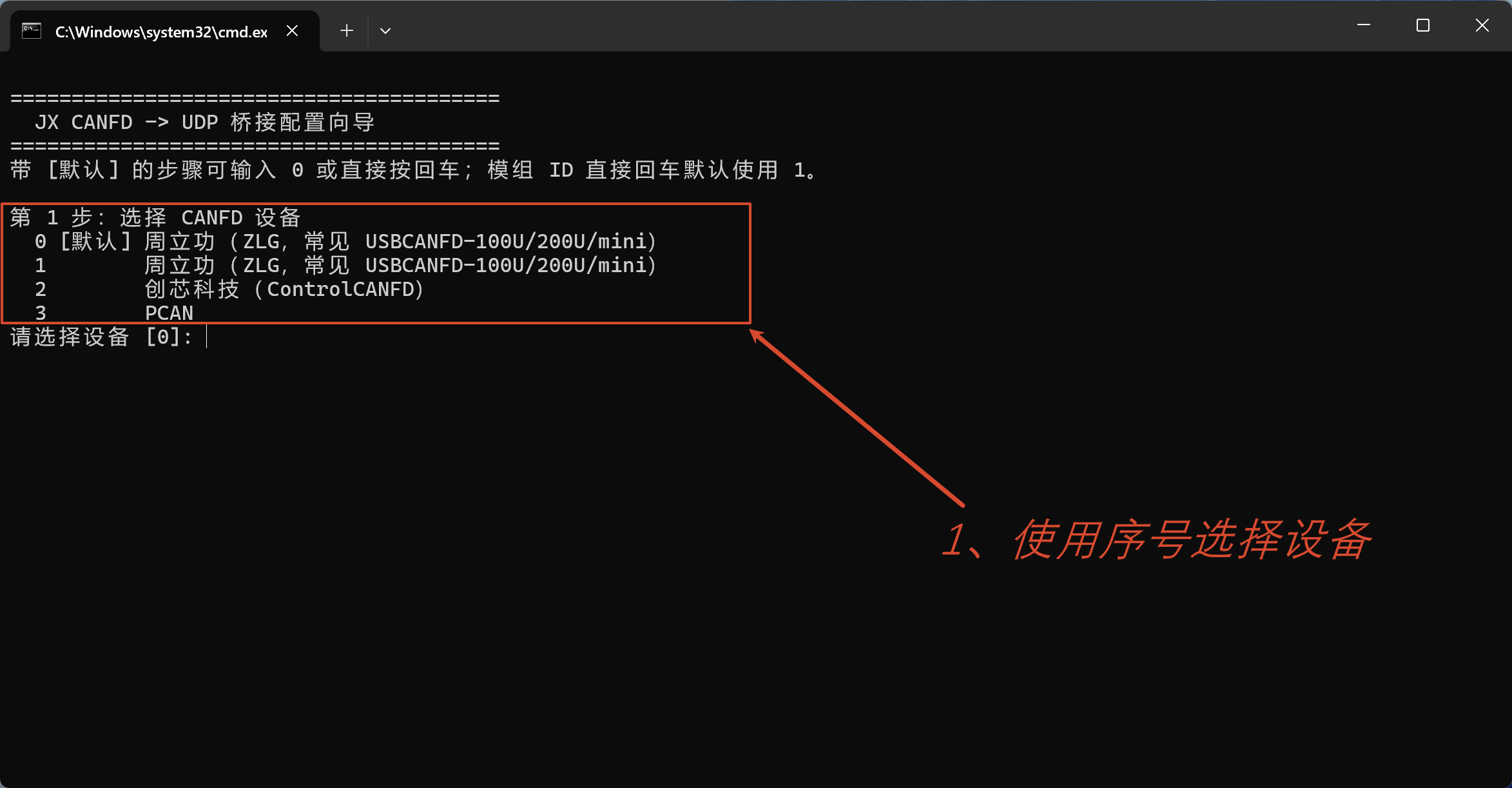
桥接工具启动后,先选择 CAN FD 设备类型。每个选项前都有序号,输入对应序号后按回车即可;带 [默认] 的选项可直接按回车使用。
常见选项包括:
| 序号 | 设备类型 | 说明 |
|---|---|---|
0 | 周立功 ZLG 常见 USBCANFD-100U/200U/mini | 默认选项,适用于常见 ZLG CAN FD 适配器。 |
1 | 周立功 ZLG 常见 USBCANFD-100U/200U/mini | 另一个 ZLG 设备入口,按现场设备实际情况选择。 |
2 | 创芯科技 ControlCANFD | 适用于创芯科技 CAN FD 适配器。 |
3 | PCAN | 适用于 PCAN 适配器。 |
如果使用默认 ZLG 设备,可在“请选择设备 [0]”处直接按回车。
3.3 完成桥接配置
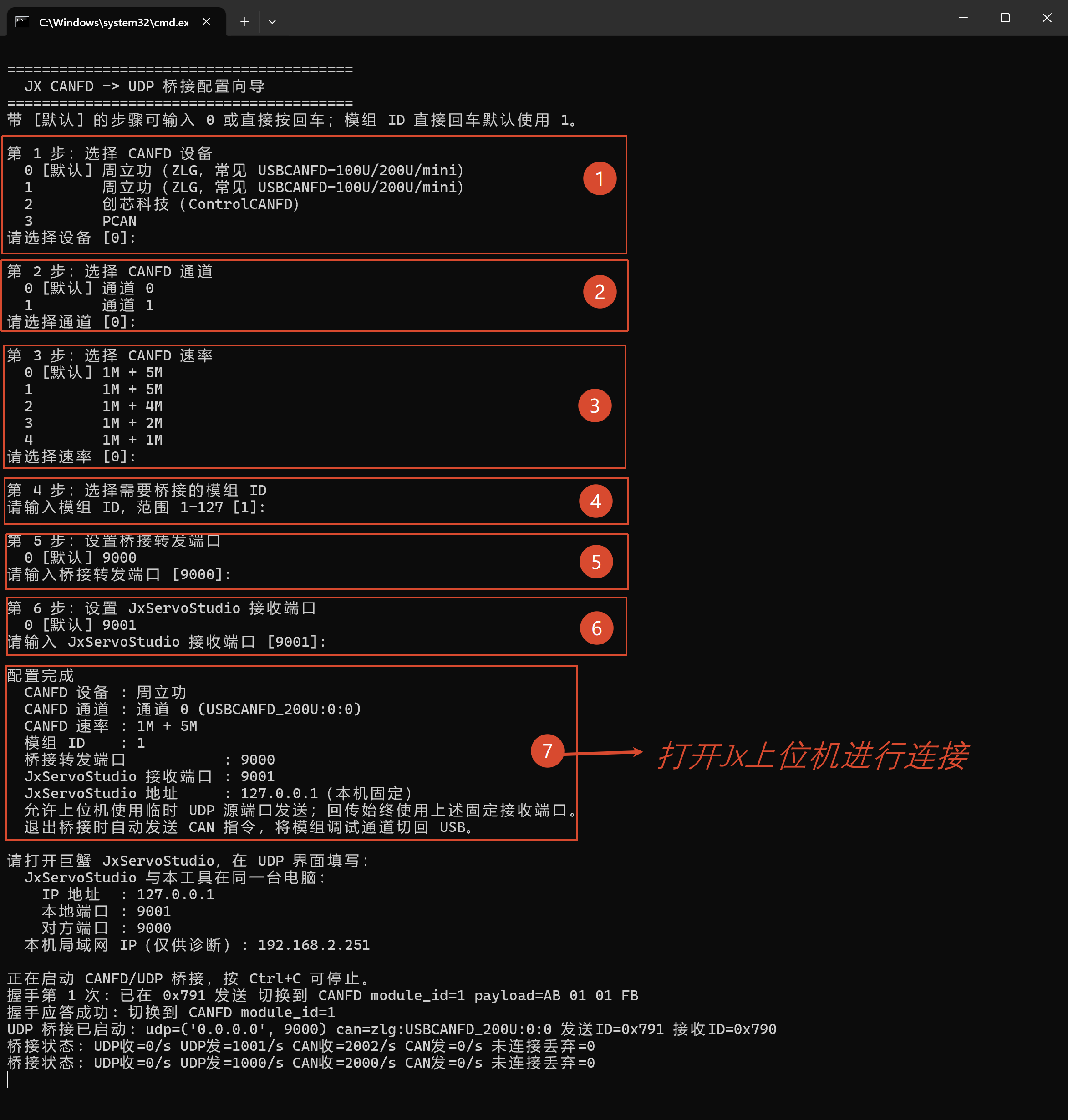
按命令行提示依次设置 CANFD 通道、CANFD 速率、模组 ID、桥接转发端口和 JxServo Studio 接收端口。
推荐先使用默认配置完成首次连接:
| 配置项 | 默认值 | 说明 |
|---|---|---|
| CANFD 通道 | 0 | 对应 CAN FD 适配器的第 0 通道。双通道适配器可按实际接线选择 0 或 1。 |
| CANFD 速率 | 1M + 5M | 仲裁段 1M、数据段 5M。必须与设备当前 CAN FD 速率一致。 |
| 模组 ID | 1 | 需要桥接的目标设备 ID,范围 1 到 127。 |
| 桥接转发端口 | 9000 | JxServo Studio 发送 UDP 数据时填写的对侧端口。 |
| JxServo Studio 接收端口 | 9001 | JxServo Studio 本地接收 UDP 数据的端口。 |
配置完成后,命令行窗口会显示桥接摘要和 UDP 参数。请确认这些参数与第 2 章中 JxServo Studio 已打开的 UDP 监听参数一致。工具显示“UDP 桥接已启动”后,保持该命令行窗口打开。
桥接工具与 JxServo Studio 在同一台电脑运行时,JxServo Studio 的 IP 地址填写 127.0.0.1。桥接工具退出时会自动发送切换指令,将模组调试通道切回 USB。
4. 确认连接成功
连接成功后,JxServo Studio 的连接状态会变为绿色,设备列表会显示已识别到的设备信息。右侧“常用数量”区域会自动显示母线电流、母线电压、关节速度、关节角度、电机速度、当前 Iq 电流、MOS 温度、电机温度和力传感器等基础状态。
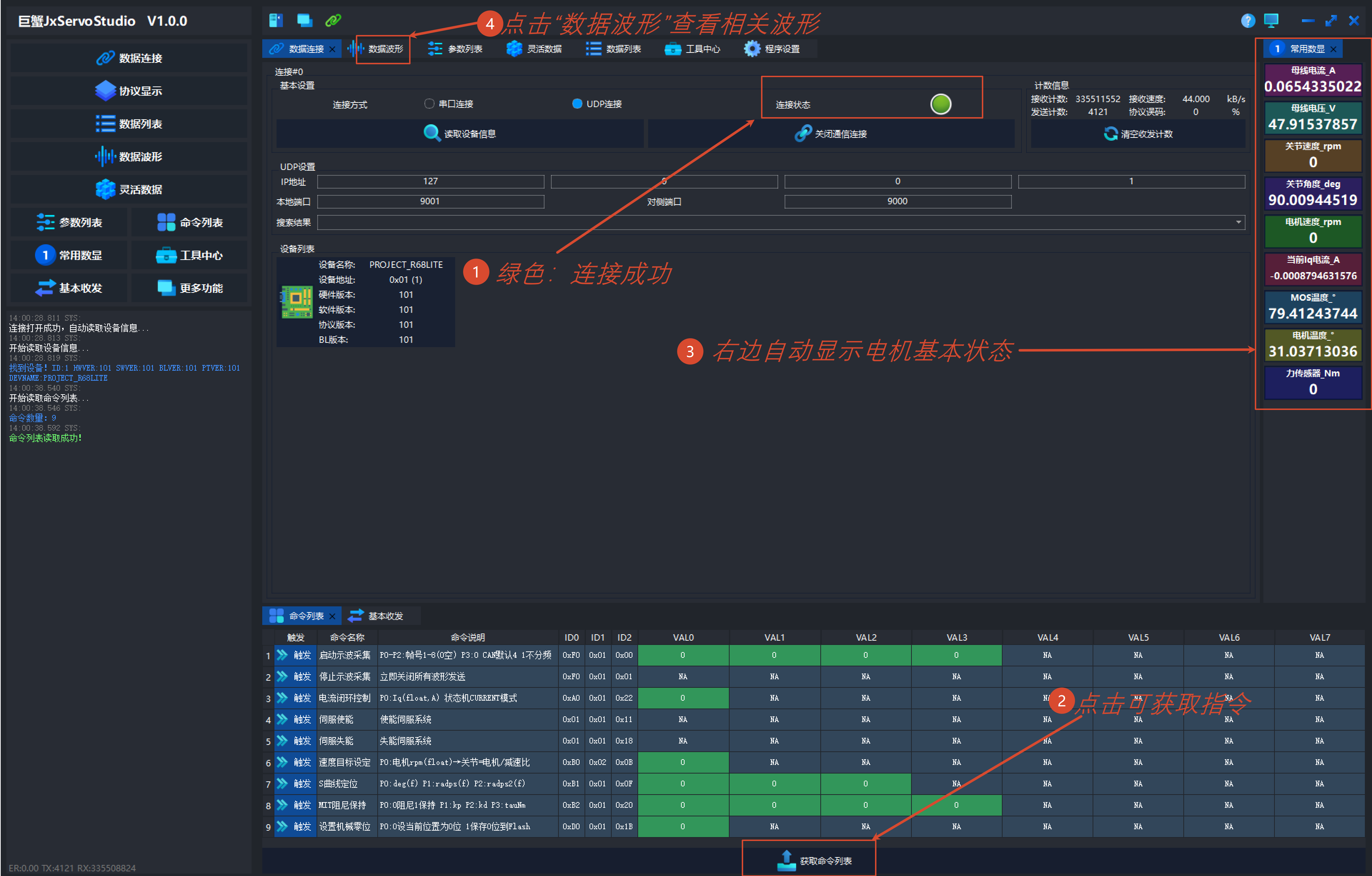
可通过以下现象确认 CAN FD 桥接通信正常:
- “连接状态”指示灯变为绿色。
- 设备列表中显示设备名称、设备地址、硬件版本、软件版本、协议版本和 BL 版本等信息。
- 左下角日志区域出现设备信息读取成功、命令列表读取成功等提示。
- 右侧常用数据显示设备基础状态。
- 点击底部“获取命令列表”后,命令列表区域显示当前设备支持的指令。
需要查看实时曲线时,点击“数据波形”页面,并按 UM0001 第 3.5 节 添加需要观察的数据项。
5. 结束桥接
结束调试时,建议按以下顺序关闭:
- 在 JxServo Studio 中点击“关闭通信连接”。
- 在桥接工具命令行窗口中按
Ctrl+C停止桥接。 - 等待工具完成退出处理后,再关闭命令行窗口。
如果后续需要重新使用 USB 直连方式,请先正常退出桥接工具,再重新连接 JxServo Studio。
6. 常见问题排查
6.1 桥接工具提示 WinError 10054 后退出
如果桥接工具启动后提示 [WinError 10054] 远程主机强迫关闭了一个现有的连接,通常是 JxServo Studio 尚未提前打开 UDP 监听,或本地端口填写不一致。请先在 JxServo Studio 的“数据连接”页面选择“UDP连接”,填写 IP 地址 127.0.0.1、本地端口 9001、对侧端口 9000,点击“打开通信连接”,再重新启动 CANFD 桥接工具。
6.2 JxServo Studio 连接状态没有变绿
先检查桥接工具命令行窗口是否仍在运行,并确认窗口中已经显示“UDP 桥接已启动”。然后检查 JxServo Studio 中是否选择了“UDP连接”,IP 地址、本地端口和对侧端口是否分别为 127.0.0.1、9001 和 9000。
6.3 桥接工具无法打开 CANFD 设备
检查 CAN FD 适配器驱动是否已经安装,适配器是否已经插入电脑,设备类型和通道是否选择正确。若同一适配器正在被其他软件占用,请先关闭其他 CAN FD 调试软件后再启动桥接工具。
6.4 能启动桥接,但读取不到设备信息
重点检查 CAN FD 接线、终端电阻、设备供电、模组 ID 和 CAN FD 速率。桥接工具中的模组 ID 必须与目标设备一致,CAN FD 速率必须与设备当前总线速率一致。
6.5 端口被占用或通信异常
默认端口为 9000 和 9001。如果端口被其他程序占用,可在桥接工具配置时改用其他端口,并在 JxServo Studio 的 UDP 设置中同步修改本地端口和对侧端口。首次运行时如 Windows 防火墙提示网络访问权限,请允许本机 UDP 通信。